




IO57 - Шаговые двигатели со встроенным драйвером




Техническое описание в формате .pdf
Заказ товара
Для того, чтобы сделать заказ, вы можете:
Прислать заявку по почте ring@upel.ru
Позвонить по тел./отправить факс на +7 (499) 490-03-65
Написать в Whatsapp
Мы работаем только с юридическими лицами. Соответственно, при оплате наших товаров используется только безналичный расчет. По предоплате и с НДС. Минимальная сумма заказа составляет пять тысяч рублей. Счет действителен в течение 3 рабочих дней.
Сроки отгрузки также указываются и в коммерческом предложении, и в счете. Мы делаем все возможные скидки крупным и постоянным клиентам. Если у вас есть достаточно крупный заказ или вы готовы заказывать регулярно — вам стоит обратиться к менеджеру и обсудить свою ПЕРСОНАЛЬНУЮ скидку.
Технические характеристики
| Характеристика | Значение |
|---|---|
| Производитель | Fulling Motor |
| Угол шага | 1.8° |
| Погрешность угла шага | ±5% |
| Радиальный люфт | 0.02 мм при 450 г |
| Осевой люфт | 0.08 мм при 450 г |
| Максимальное радиальное усилие (Н) | 75 |
| Максимальное осевое усилие (Н) | 15 |
| Диэлектрическая прочность | 600VAC / 1s |
| Изоляционное сопротивление | 100MОм, 500VDC |
| Колебание температуры | -20°C~+50°C |
| Класс изоляции | Класс Б |
Стандартные модели
| Характеристика | Модель | |
|---|---|---|
| IO57-10 | IO57-22 | |
| Ток (А) | 2.8 | 2.8 |
| Сопротивление (Ом) | 0.9 | 1.13 |
| Индуктивность (мГн) | 2.5 | 3.6 |
| Удерживающий крутящий момент (Н·м) | 1.26 | 1.86 |
| Фиксирующий крутящий момент (Н·м) | 0.04 | 0.068 |
| Количество выводных контактов | 4 | 4 |
| Инерция ротора (г·см²) | 300 | 480 |
| Масса (кг) | 0.9 | 1 |
| Длина (мм) | 56.0 | 76.0 |
| Номинальная мощность (Вт) | - | 3.2 |
IO57-10
| Ток (А) | 2.8 |
| Сопротивление (Ом) | 0.9 |
| Индуктивность (мГн) | 2.5 |
| Удерживающий крутящий момент (Н·м) | 1.26 |
| Фиксирующий крутящий момент (Н·м) | 0.04 |
| Количество выводных контактов | 4 |
| Инерция ротора (г·см²) | 300 |
| Масса (кг) | 0.9 |
| Длина (мм) | 56.0 |
| Номинальная мощность (Вт) | - |
IO57-22
| Ток (А) | 2.8 |
| Сопротивление (Ом) | 1.13 |
| Индуктивность (мГн) | 3.6 |
| Удерживающий крутящий момент (Н·м) | 1.86 |
| Фиксирующий крутящий момент (Н·м) | 0.068 |
| Количество выводных контактов | 4 |
| Инерция ротора (г·см²) | 480 |
| Масса (кг) | 1 |
| Длина (мм) | 76.0 |
| Номинальная мощность (Вт) | 3.2 |
Общее описание
Модель IO57 представляет собой шаговый двигатель со встроенным драйвером. Ключевые технические параметры включают стандартный угол шага 1.8° с точностью ±5%, минимальный радиальный (0.02 мм) и осевой (0.08 мм) люфт. Конструкция двигателя обеспечивает устойчивость к повышенным радиальным нагрузкам до 75 Н и осевым до 15 Н.
Конструктивной особенностью системы является интегрированный драйвер с расширенным диапазоном входного напряжения (20-50 В постоянного тока) и пиковым током до 5.6 А. Встроенная электроника обеспечивает гибкую настройку микрошага (от 1/2 до 1/128), динамическую регулировку тока и стандартный интерфейс управления (импульсы PUL/DIR). Это решение предназначено для создания компактных и мощных систем, где требуется упрощение монтажа, уменьшение количества внешних соединений и обеспечение высокой производительности.
Электрический индикатор привода
| Технические характеристики | Мин. | Тип. | Макс. | Единица измерения |
|---|---|---|---|---|
| Входное напряжение (постоянный ток) | 20 | 36 | 50 | В постоянного тока |
| Выходной ток (пиковый) | 1.5 | - | 5.6 | A |
| Шаг частоты импульсов | 0 | - | 200 | КГц |
| Импульсное напряжение | - | 5 | - | В постоянного тока |
| Входной ток управляющего сигнала | 7 | 10 | 16 | мА |
| Сопротивление изоляции | 100 | - | - | МОм |
Входной интерфейс управляющего сигнала
| Описание пина | Функция |
|---|---|
| +B постоянного тока | Напряжение: 12 ~ 32 В постоянного тока, напряжение ЭДС. Электропитание: 12 ~ 32 В постоянного тока, включая колебания напряжения и напряжение ЭДС. |
| Земля | Земля питания |
| PUL-
PUL-(PUL) |
Параметры PUL-напряжения: 4 ~ 5В, 0 ~ 0.5 В. 2,5-вольтовый источник питания +12 В +24 В, напряжение питания.Импульсный управляющий сигнал: передний фронт импульса допустим; высокий уровень PUL составляет 4 - 5 В, низкий уровень - 0 - 0.5 В. Для надёжного реагирования на импульсные сигналы длительность импульса должна быть более 2.5 В. При использовании +12 В или +24 В требуется сопротивление цепи. |
| НАПР+(+5В)
DIR-(DIR) |
Сигнал направления: сигнал высокого/низкого уровня. Для обеспечения надёжной коммутации двигателя сигнал направления должен быть установлен до того, как импульсный сигнал будет подан не менее чем за 5 мкс. Начальное направление вращения двигателя зависит от его схемы подключения. Перестановка любой из фаз обмотки (например, A+, A-) может изменить начальное направление вращения двигателя. DIR – высокий уровень 4 - 5 В, низкий уровень 0 - 0.5 В. |
| ENA+(+5В)
ENA-(ENA) |
Сигнал разрешения: Этот входной сигнал используется для включения или выключения. Когда ENA+ подключен к +5 В, а ENA- — к низкому уровню (или включена внутренняя оптопара), драйвер отключает ток каждой фазы двигателя, освобождая его, и импульс шага не реагирует. Когда эта функция не требуется, сигнал разрешения остаётся плавающим. |
Описание контактов интерфейса вывода двигателя
| Пин | Описание функции |
|---|---|
| A+ | Фаза двигателя A+ |
| A- | Фаза двигателя A- |
| B+ | Фаза двигателя B+ |
| E- | Фаза двигателя B- |
Настройка переключателя
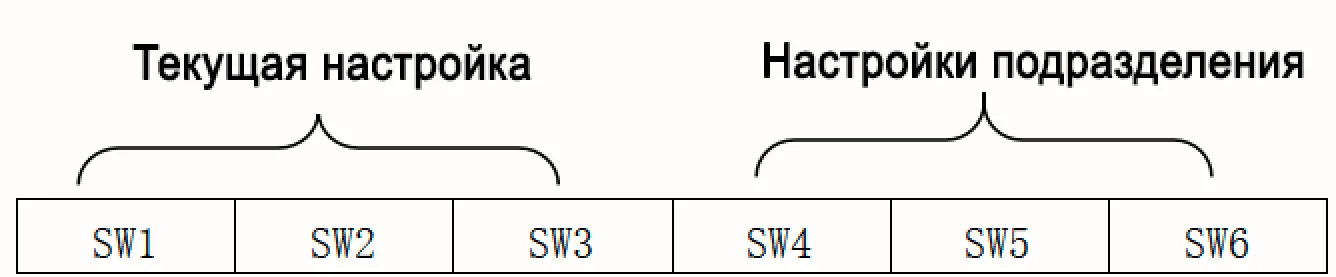
Динамическая настройка тока
| Пиковый ток | Среднеквадратичное значение тока | SW1 | SW2 | SW3 |
|---|---|---|---|---|
| По умолчанию 1.5 А [PK] |
|
ВКЛ | ВКЛ | ВКЛ |
| 2.1 А | 1.5 А | ВЫКЛ | ВКЛ | ВКЛ |
| 2.7 А | 1.9 А | ВКЛ | ВЫКЛ | ВКЛ |
| 3.2 А | 2.3 А | ВЫКЛ | ВЫКЛ | ВКЛ |
| 3.8 А | 2.7 А | ВКЛ | ВКЛ | ВЫКЛ |
| 4.3 А | 3.1 А | ВЫКЛ | ВКЛ | ВЫКЛ |
| 4.9 А | 3.5 А | ВКЛ | ВЫКЛ | ВЫКЛ |
| 5.6 А | 4 А | ВЫКЛ | ВЫКЛ | ВЫКЛ |
Выбор разрешения микрошага
| Шаги/об. (для двигателя 1.8°) | SW4 | SW5 | SW6 |
|---|---|---|---|
| По умолчанию (400) | ВКЛ | ВКЛ | ВКЛ |
| 800 | ВЫКЛ | ВКЛ | ВКЛ |
| 1600 | ВКЛ | ВЫКЛ | ВКЛ |
| 3200 | ВЫКЛ | ВЫКЛ | ВКЛ |
| 4000 | ВКЛ | ВКЛ | ВЫКЛ |
| 5000 | ВЫКЛ | ВКЛ | ВЫКЛ |
| 6400 | ВКЛ | ВЫКЛ | ВЫКЛ |
| 12800 | ВЫКЛ | ВЫКЛ | ВЫКЛ |
Остались вопросы?
Не нашли нужную модель или нужна консультация по продукции? Наши менеджеры будут рады Вам помочь разобраться во всем. Просто заполните форму, и мы свяжемся с Вами как можно скорее.